
 |
 |
STRUMENTI e SOPRALLUOGHI
|
Gli strumenti che vengono utilizzati in fase di sopralluogo sono stati scelti sulla base della loro applicabilità pratica su larga scala nei contesti produttivi (mappatura di siti produttivi): L’applicazione di tali strumenti non incrementa significativamente il tempo tipico di rilievo e consente di basare le successive analisi su dati strumentali quantitativi. I rilievi strumentali vedono il coinvolgimento, se possibile, di 2 operatori per postazione, rappresentativi degli estremi antropometrici (5° e 95° percentile), che svolgono più volte i cicli lavorativi di interesse. |
MVN Biomech – Xsens ®
Analisi strumentale di movimento e posture tramite Sistema Inerziale
|
|
 |




SOFTWARE ERGOCERT E VALUTAZIONI EROGATE
ALTRI SOFTWARE
VANTAGGI DELLA VALUTAZIONE STRUMENTALE
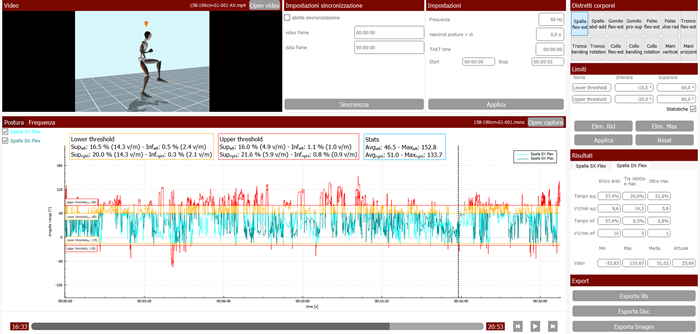
- Valutazione mediante sistemi inerziali motion capture delle posture incongrue degli arti superiori (OCRA) e successivamente di quelle statiche del rachide lombare e cervicale (ISO 11226):
-
-
-
Aumento della precisione nella rilevazione e della base dati (diversi addetti)
-
Possibilità di effettuare sessioni complete di cicli di lavoro anche di lunga durata
-
Velocità nella elaborazione dei dati
-
Fedeltà nel rilievo del gesto tecnico in quanto l’operatore non si sente osservato
-
-
-
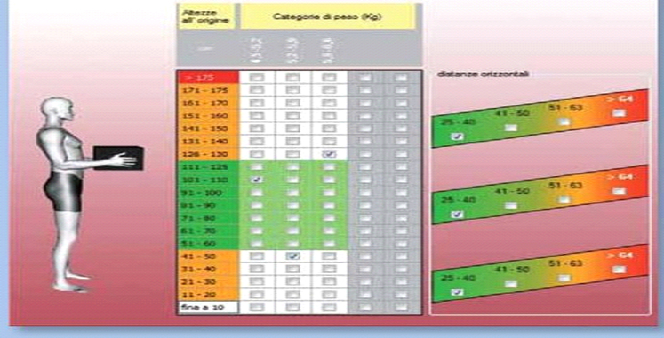
- (Rilievi per valutazione NIOSH / VLI)
-
-
- Oggettivazione della posizione verticale ed orizzontale delle mani
-
-
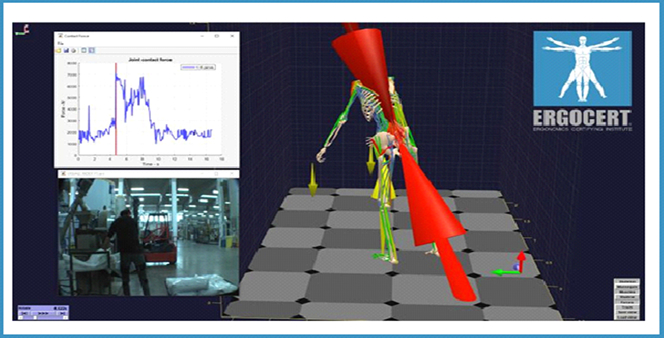
- Applicazione di «BoB» (Biomechanics of Bodies) al fine di stimare carichi i intra-discali e le attivazioni muscolari:
-
-
-
Rappresentazione grafica delle attivazioni muscolari e dei carichi intra-discali
-
Quantificazione dei valori riferiti a quanto sopra
-
-
-
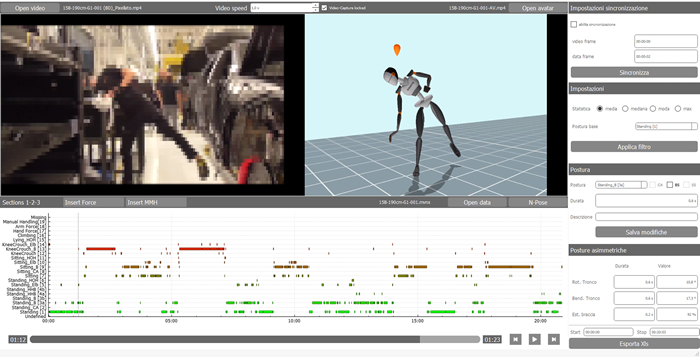
- (Valutazione secondo metodo OWAS – EAWS1):
-
-
- Riconoscimento automatico delle posture a corpo intero (es. eretto, seduto, inginocchiato, ecc.
- Aumento della precisione nella rilevazione
- Possibilità di effettuare sessioni complete dei cicli di lavoro
- Velocità nella elaborazione dei dati
- Fedeltà nel rilievo del gesto tecnico in quanto l’operatore non si sente osservato
-
-
- Riconoscimento automatico posture a corpo intero (metodo OWAS – EAWS1):
-
-
- Valutazione assunzione e mantenimento di posture erette, sedute, inginocchiate, arrampicate
- Aumento della precisione nella rilevazione e della base dati (diversi addetti)
- Possibilità di effettuare sessioni complete di cicli di lavoro anche di lunga durata
- Velocità nella elaborazione dei dati
- Fedeltà nel rilievo del gesto tecnico in quanto l’operatore non si sente osservato
-
-
- Pre-conteggio automatico delle azioni tecniche (metodo OCRA):
-
-
- Aumento della precisione nella rilevazione e della base dati (diversi addetti)
- Possibilità di effettuare sessioni complete di cicli di lavoro anche di lunga durata
- Velocità nella elaborazione dei dati
- Fedeltà nel rilievo del gesto tecnico in quanto l’operatore non si sente osservato
-
-
- Sviluppo di un guanto sensorizzato per valutare l’attivazione delle diverse aree della mano e stimare la forza applicata:
-
-
- Misurazione del livello di impiego delle diverse aree della mano
- Riconoscimento automatico dei tipi di presa
- Misurazione della forza per calcolo da inserire nei diversi protocolli di valutazione del rischio
-
-
ISO 11226:2000 - Ergonomia - Valutazione delle posture di lavoro statiche
UNI ISO 11228-1:2009 - Ergonomia - Movimentazione manuale - Parte 1: Sollevamento e trasporto
UNI ISO 11228-2:2009 - Ergonomia - Movimentazione manuale - Parte 2: Spinta e traino
UNI ISO 11228-3:2009 - Ergonomia - Movimentazione manuale - Parte 3: Movimentazione di bassi carichi ad alta frequenza
ISO/TR 12295:2014 - Ergonomia - Documento per l'applicazione delle norme ISO alla movimentazione manuale di carichi (ISO 11228-1, ISO 11228-2 e ISO 112283) e la valutazione delle posture di lavoro statiche (ISO 11226)
UNI EN 1005-1:2009 - Sicurezza del macchinario - Prestazione fisica umana - Parte 1: Termini e definizioni
UNI EN 1005-2:2009 - Sicurezza del macchinario - Prestazione fisica umana - Parte 2: Movimentazione manuale di macchinario e di parti componenti il macchinario
UNI EN 1005-3:2009 - Sicurezza del macchinario - Prestazione fisica umana - Parte 3: Limiti di forza raccomandati per l’utilizzo del macchinario
UNI EN 1005-4:2009 - Sicurezza del macchinario - Prestazione fisica umana - Parte 4: Valutazione delle posture e dei movimenti lavorativi in relazione al macchinario
UNI EN 1005-5:2007 - Sicurezza del macchinario - Prestazione fisica umana - Parte 5: Valutazione del rischio connesso alla movimentazione ripetitiva ad alta frequenza

